COMPLEX EVENT PROCESS CONTROL WITH INTEL EMBEDDED HARDWARE AND GEMBO INDUSTRY 4.0 SOFTWARE
INTRODUCTION
The GEMBO PRECARE platform enables manufacturers to seamlessly make the transition to Industry 4.0 literally overnight, while keeping their investments in legacy machines; thus, being able to tap into the potential of real-time access to machine data in order to improve efficiency, productivity and quality.
Real-time access to machine data can be through any combination of sensors, serial and parallel port interfaces, Ethernet and sensors, no matter where the data is originating from, i.e., directly from the machine, or indirectly from a PLC or a data store on a network. Complex event process control at the edge of the cloud or at the machine itself requires hardware platforms with adequate processing power. GEMBO Precare supports edge processing through the use of powerful software agents. These agents take full advantage of the capabilities of the underlying hardware.
In this white paper we show how the GEMBO Precare Industry 4.0 IoT platform takes advantage of Intel® x86 processor and Intel® Altera® Cyclone V SoC FPGA hardware capabilities to implement process monitoring and control at the edge in an industrial flow control application.
GEMBO PRECARE MOTOR CONTROL AGENT
Motors used in machines and production processes are very common and the ability to monitor them in real-time is understandably of crucial importance. GEMBO has developed an end-to-end motor control and monitoring solution in collaboration with Intel® and B&R Automation®, which takes advantage of the versatile and powerful GEMBO Agents for CEP at the edge and the GEMBO Precare cloud platform for monitoring and predictive maintenance. The process diagram shown below depicts a flow control application example. Control of a pump controls the flow rate in a pipe, and a safety valve prevents overpressure inside the pipe.

The critical parameters that are controlled in this setup for the pipe are pressure, flow rate and flow path. The latter is controlled by a safety valve. For the pump these critical parameters are the pump’s motor temperature, RPM, current consumption, vibration and acoustic noise. Pipe pressure and flow rate are directly influenced by the RPM of the pump’s motor.
The system diagram for the monitoring of these parameters and controlling the motor and the safety valve is shown below.
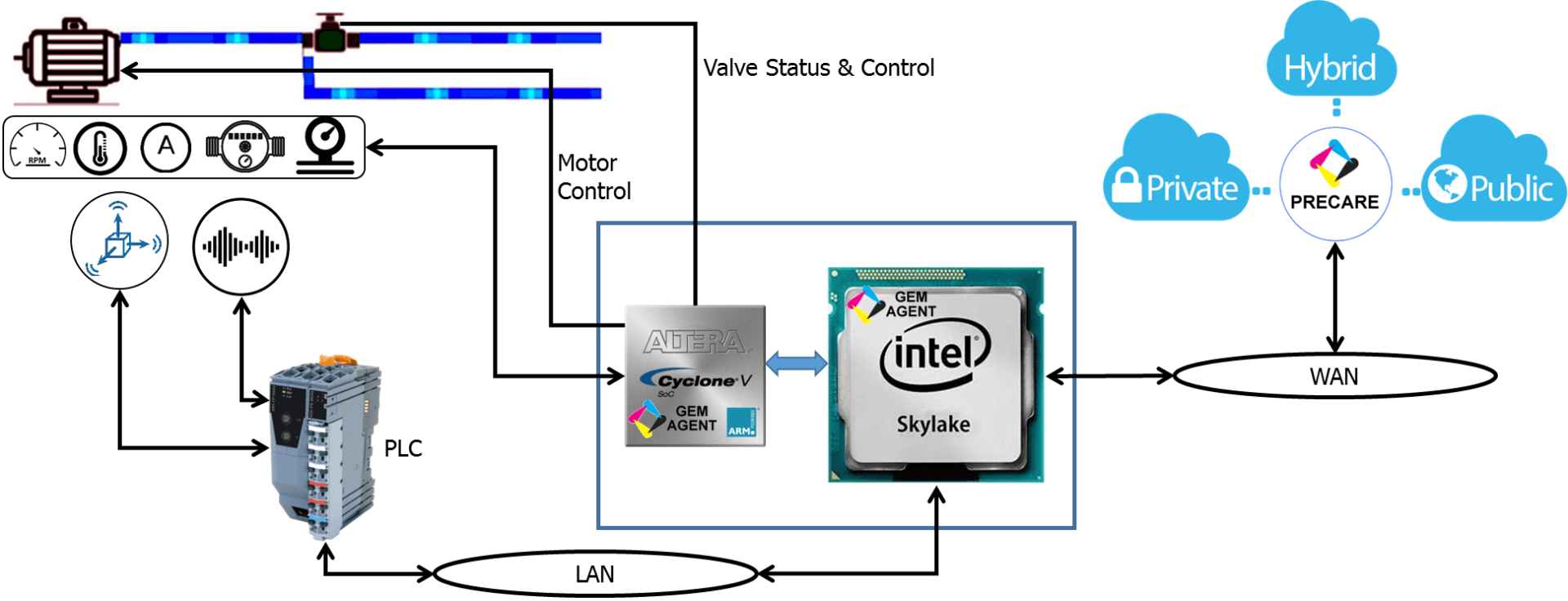
A PCIe add-on card with an Intel® Cyclone V SoC FPGA performs the actual motor control and sensing of motor current consumption, RPM and temperature. An X20CP PLC from B&R Automation monitors vibration and acoustic noise. An Intel® Skylake x86-based computer runs the GEMBO Agent and provides the communication link over Ethernet with the GEMBO PRECARE platform running in the cloud. This computer functions at the same time as a gateway and communicates over Ethernet with the B&R Automation® X20CP PLC.
A GEMBO Agent runs on the embedded ARM processor in the Cyclone V FPGA, collecting the motor parameters. Another GEMBO Agent runs in OPC UA client mode on the computer based on the Intel® Skylake CPU. This agent collects the sensor data coming from the GEMBO Agent on the FPGA and from the B&R Automation® X20CP PLC. This PLC runs in OPC UA server mode. The OPC UA client/server model adds the benefit that all communication between the different entities in the network conform to open industry standards.
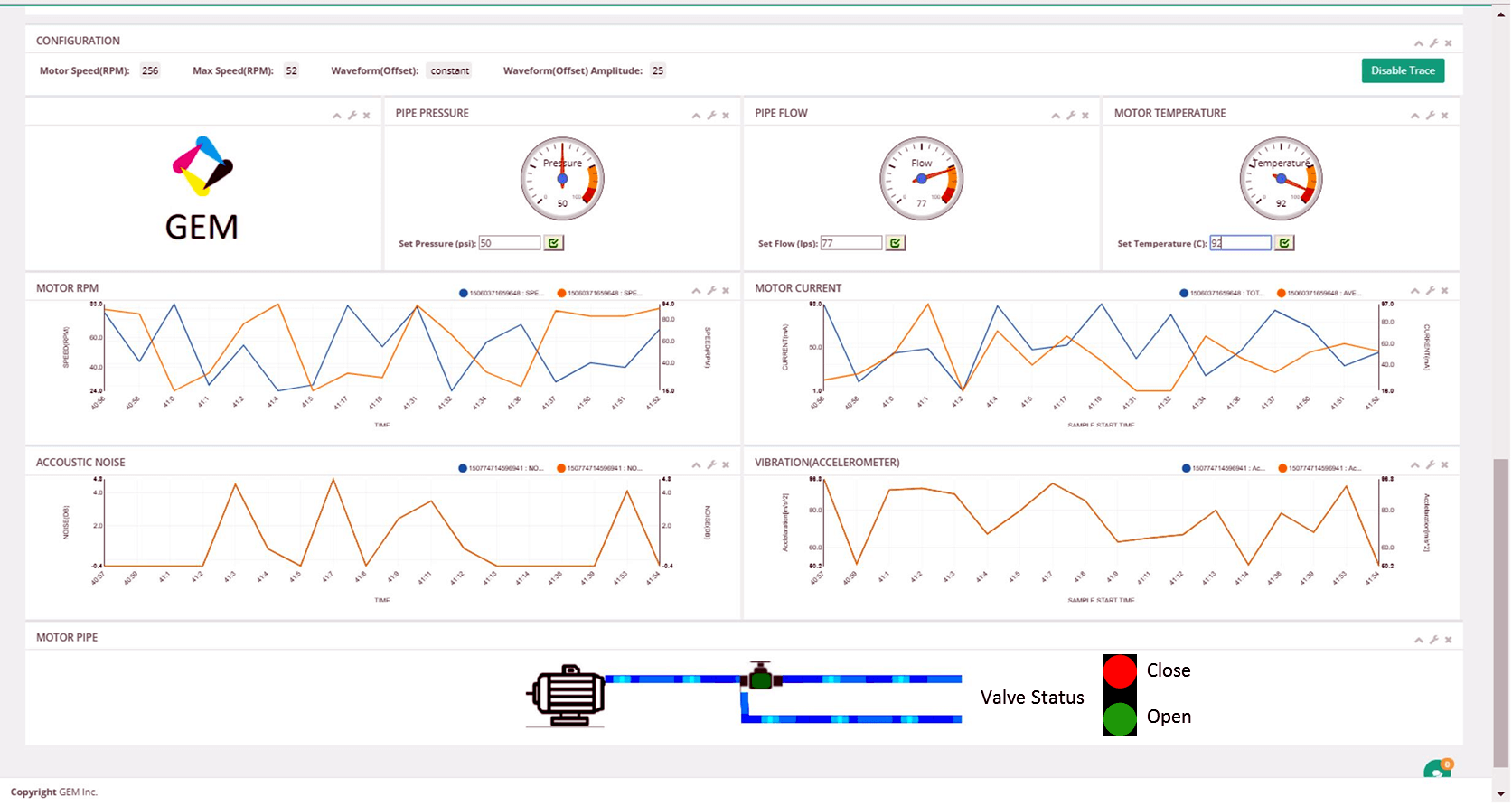
GEMBO PRECARE MOTOR CONTROL DASHBOARD
The GEMBO PRECARE dashboard is shown below. The dashboard uses gauge widgets to present the pipe pressure and flow, as well as the pump’s motor temperature in real-time. Pump motor RPM and current consumption, as well as the pump motor vibration and acoustic noise are shown in real-time in graph widgets. The safety valve status is displayed by a “traffic light” widget, which switches on the corresponding light when the valve is open or closed.
The complex event processing (CEP) rules implemented for the control of the motor are as follows:
- If motor temperature exceeds temperature threshold level 1 and motor RPM exceeds RPM threshold, then the GEMBO Agent will start reducing the RPM; the GEMBO PRECARE platform will display a high temperature alarm and the action undertaken by the GEMBO Agent to prevent a catastrophic failure, until the temperature has dropped again below temperature threshold level 1.
- If motor temperature exceeds temperature threshold level 2 and motor RPM exceed RPM threshold, then the GEMBO Agent will immediately reduce the motor RPM to zero and simultaneously open the safety valve to relieve pressure in the pipe; the GEMBO PRECARE platform will display a catastrophic high temperature alarm and the action undertaken by the GEMBO Agent, until the temperature has dropped again below temperature threshold level 1.
- If motor RPM exceeds RPM threshold and pipe pressure exceeds pressure threshold 1, then the GEMBO Agent will start reducing the RPM; the GEMBO PRECARE platform will display a high pressure alarm and the action undertaken by the GEMBO Agent to prevent a catastrophic failure, until the pressure has dropped again below pressure threshold level 1.
- If motor RPM exceeds RPM threshold and pipe pressure exceeds pressure threshold 2, then the GEMBO Agent will immediately reduce the motor RPM to zero; the GEMBO PRECARE platform will display a catastrophic high pressure alarm and the action undertaken by the GEMBO Agent, until the pressure has dropped again below pressure threshold level 1.
The above illustrates the power and advantage of the GEMBO Agent in order to execute edge CEP for time-critical monitoring and control. This allows the GEMBO Agent to take immediate action and do so autonomously rather than under control of GEMBO PRECARE.
The same motor control instance can be repeated many times in a large plant with multiple motors and safety valves, such as in a distillery for instance. Each instance is connected via the GEMBO Agents to the GEMBO PRECARE platform. Whereas the GEMBO Agents perform control and CEP at the edge, the GEMBO PRECARE platform is fed data from all motor control instances in the plant, allowing it to present a dashboard for each instance, calculate OEE, MTBF and MTBA for each instance as well as for the entire plant, and analyze the monitored signals to create predictive maintenance models.
CONCLUSIONS
GEMBO Agents are able to take full advantage of the hardware they run on for complex event processing at the edge rather than in the cloud. This includes optimal use of the compute power available on Intel® x86 CPUs and the application specific circuits programmed into Intel® Altera® Cyclone V FPGAs. Such capability reduces latency for time-critical monitoring and control applications, such as for a complex system of motor and valve as illustrated here. Furthermore, GEMBO Agents support the OPC UA client/server model for interoperability with modern PLCs. And finally, GEMBO Precare allows real-time remote monitoring and visualization via the cloud of critical parameters and signals with notifications for alarms and other events.